 ニックネーム: 居酒屋ガレージ店主 ★ZAQのBlogari停止のため、あれこれ「データ吸い出し」対策しています。 新規記事はとりあえず停止。 コメント書き込みはまだ有効です。 (JH3DBO 下間憲行) |

2014年09月28日(日)
トラ技ARMライタ mbedであれこれ
|
トラ技ARMライタ、初通電の続き。 mbed環境でのarmマイコンの処理具合を調べてみました。 ソフトでパルスを出したときの変動です。 armマイコン、なにせRISCアーキテクチャ。 実行速度を向上させるためにあれこれ手がつくされています。 ※こんなの ADD{s} SUB{s} MOV{s} これらの命令「{s}」のところに以下の実行条件が入ります。 EQ ゼロ判断 NE ゼロじゃない CS,HS キャリーあり CS,LO キャリーなし MI マイナス PL プラス : 実行前のフラグを判断して、その命令を実行するか どうかを決めるのです。 条件ジャンプ命令を使わなくても、命令実行条件を 判断できるわけです。 人が考えて書く機械語じゃなく、高級言語が最適な実行 命令を選んじゃいます。 それを確かめてみました。 たとえば、こんなループ。 単純にパルスを8つ出すだけ。 for(n = 0; n < 8; n++){ led1_on; led1_off; } オシロで観察すると (クリックで拡大↓) 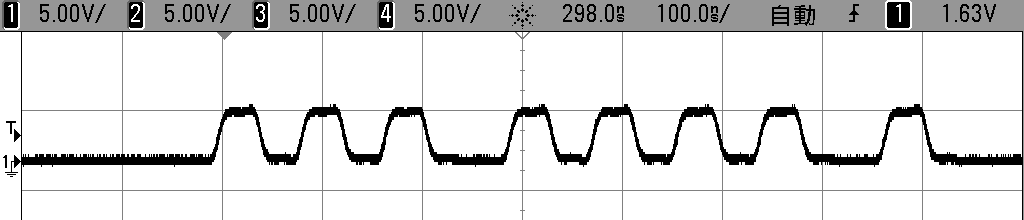 Lのパルス幅が変動しています。 for文の終了判定に 「for」じゃなく「while」でループさせても同じ波形が 出ました。 n = 8; while(n){ led1_on; led1_off; n--; } う〜む。 http://smartdata.usbid.com/datasheets/usbid/2000/2000-q4/armdui0040dj011-00.pdf ↑ ここの27ページ「5.4」に解説が見つかります。 で、こんなループにすると。 n = 8; while(1){ led1_on; led1_off; n--; if(n == 0) break; } 「if」で判定してwhileを抜け出します。 すると、こんなパルスに(クリックで拡大↓) 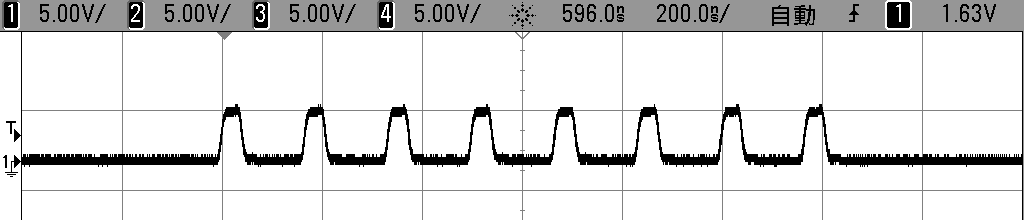 パルス列の時間変動はなくなりましたが、L区間の時間が 倍ほどになっています。 おそるべし、RISCマイコン。 |
2014年9月28日 09時18分
| 記事へ |
コメント(0) |
トラックバック(0) |
| ・電子回路工作 |
トラックバックURL:http://blog.zaq.ne.jp/igarage/trackback/3903/
※ブログ管理者が承認するまで表示されません
| ・電子回路工作 |
トラックバックURL:http://blog.zaq.ne.jp/igarage/trackback/3903/
※ブログ管理者が承認するまで表示されません
コメント