 ニックネーム: 居酒屋ガレージ店主 ★ZAQのBlogari停止のため、あれこれ「データ吸い出し」対策しています。 新規記事はとりあえず停止。 コメント書き込みはまだ有効です。 (JH3DBO 下間憲行) |

2016年02月19日(金)
Arduinoのタイマー処理
|
Arduinoの内部で勝手に実行されているタイマー割り込み、 (タイマー0のオーバーフローが使われている) その実行時間を調べておきました。 いわゆるシステム割り込みで、ユーザープログラムが走り 始める時、その裏でこれが勝手に走り始めます。 これが、millis()関数などのタイマーを管理しています。 メイン側で、タイミングにクリチカルな処理を行う時は、 この割り込みが裏で動いていることを自覚しておかなくて はなりません。 これがいやなら、処理の前に割り込み禁止命令を入れてお きます。 ただし、1ミリ秒以内に割り込みを有効に戻しておかないと タイマーが遅れます。 ●確認方法1 「loop」内で出力ポートにパルスを出し、そのパルスの 変動をオシロスコープで観察します。 スケッチはこんな具合。 void setup() { pinMode(8, OUTPUT); } void loop() { digitalWrite(8, HIGH); // pin8にH/Lパルス digitalWrite(8, LOW); } これの観察結果(クリックで拡大↓) 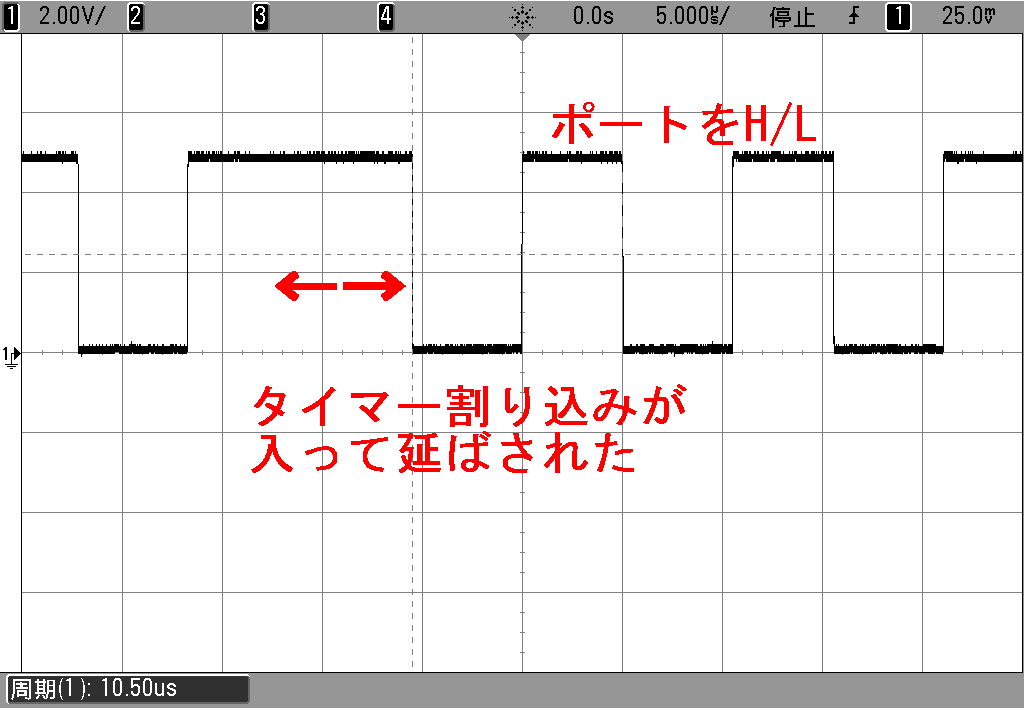 割り込み処理が入ると、パルス出力の間隔が変わり ます。 ●確認方法2 digitalWriteを使うと、パルス幅が長くなるので、 「SBI CBI」命令を使います。 #include "wiring_private.h" // sbi,cbi命令用 #define D8_H (sbi(PORTB,PORTB0)) // digital pin8 #define D8_L (cbi(PORTB,PORTB0)) void setup() { pinMode(8, OUTPUT); } void loop() { while(1){ // 永久実行で D8_H; // pin8にH/Lパルス D8_L; } } すると、こうなります。(クリックで拡大↓) 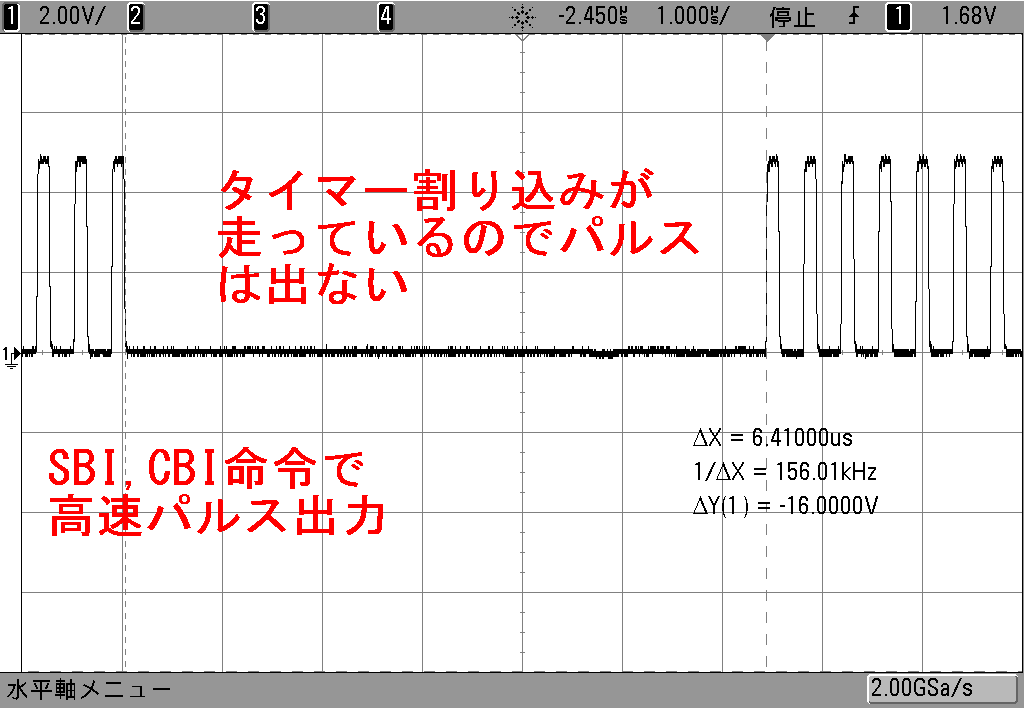 むちゃ出力パルスが早くなりました。 この処理時間(6.5マイクロ秒ほど)が約1msに1回、 入るのです。 ●割り込み周期を見る 約1msに1回と記しましたが、割り込み周期は正確な1msでは ありません。 (タイマー0のオーバーフローということで、ハードでは 微調整できないのです) それを確認してみます。 こんなスケッチです。 #include "wiring_private.h" // sbi,cbi命令用 #define D8_H (sbi(PORTB,PORTB0)) // digital pin8 #define D8_L (cbi(PORTB,PORTB0)) #define D9_H (sbi(PORTB,PORTB1)) // digital pin9 #define D9_L (cbi(PORTB,PORTB1)) unsigned long tm1; // ミリ秒タイマー void setup() { pinMode(8, OUTPUT); // pin8はサイクル実行 pinMode(9, OUTPUT); // pin9は1ms経過で } void loop() { while(1){ D8_H; // pin 8 H,Lパルス出力 D8_L; if(tm1 != millis()){ // タイマー変化あり D9_H; // pin 9 H,Lパルス出力 D9_L; tm1 = millis(); } } } こんな波形が出てきます。 まずこれ。 1msの変化検出したところ。 (クリックで拡大↓) 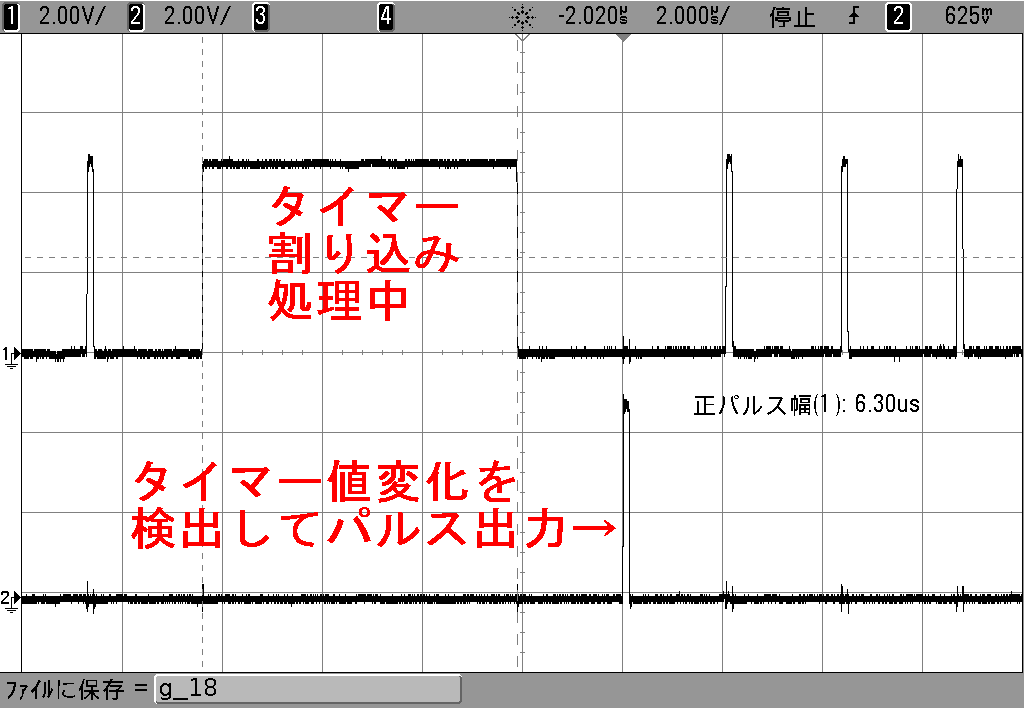 このpin9パルスの周期をオシロで読むと1msを超えて いることがわかります。 (クリックで拡大↓)  タイマー値の変化を検出して出しているパルスが1ms ちょいの間隔で見えています。 正確には、システムクロック周波数16MHzの1/64の1/256で 「1.024ms」。 (タイマー割り込み内では端数をうまく処理して millis関数での誤差が出ないようにしています) ※追記 せっかくなんで、このタイマー割り込み処理の機械語命令 を拾っておきました。(avr-objdumpを使ってで出てくる) まずこれがwiring.c内のCで記述されたタイマー割り込み プログラム。 volatile unsigned long timer0_overflow_count = 0; volatile unsigned long timer0_millis = 0; static unsigned char timer0_fract = 0; #if defined(__AVR_ATtiny24__) || defined(__AVR_ATtiny44__) || defined(__AVR_ATtiny84__) ISR(TIM0_OVF_vect) #else ISR(TIMER0_OVF_vect) #endif { unsigned long m = timer0_millis; unsigned char f = timer0_fract; m += MILLIS_INC; f += FRACT_INC; if (f >= FRACT_MAX) { f -= FRACT_MAX; m += 1; } timer0_fract = f; timer0_millis = m; timer0_overflow_count++; } コンパイルされて出てきた機械語がこれ。 00000174 <__vector_16>: 174: 1f 92 push r1 176: 0f 92 push r0 178: 0f b6 in r0, 0x3f ; 63 17a: 0f 92 push r0 17c: 11 24 eor r1, r1 17e: 2f 93 push r18 180: 3f 93 push r19 182: 8f 93 push r24 184: 9f 93 push r25 186: af 93 push r26 188: bf 93 push r27 18a: 80 91 01 01 lds r24, 0x0101 18e: 90 91 02 01 lds r25, 0x0102 192: a0 91 03 01 lds r26, 0x0103 196: b0 91 04 01 lds r27, 0x0104 19a: 30 91 00 01 lds r19, 0x0100 19e: 23 e0 ldi r18, 0x03 ; 3 1a0: 23 0f add r18, r19 1a2: 2d 37 cpi r18, 0x7D ; 125 1a4: 20 f4 brcc .+8 ; 0x1ae 1a6: 01 96 adiw r24, 0x01 ; 1 1a8: a1 1d adc r26, r1 1aa: b1 1d adc r27, r1 1ac: 05 c0 rjmp .+10 ; 0x1b8 1ae: 26 e8 ldi r18, 0x86 ; 134 1b0: 23 0f add r18, r19 1b2: 02 96 adiw r24, 0x02 ; 2 1b4: a1 1d adc r26, r1 1b6: b1 1d adc r27, r1 1b8: 20 93 00 01 sts 0x0100, r18 1bc: 80 93 01 01 sts 0x0101, r24 1c0: 90 93 02 01 sts 0x0102, r25 1c4: a0 93 03 01 sts 0x0103, r26 1c8: b0 93 04 01 sts 0x0104, r27 1cc: 80 91 05 01 lds r24, 0x0105 1d0: 90 91 06 01 lds r25, 0x0106 1d4: a0 91 07 01 lds r26, 0x0107 1d8: b0 91 08 01 lds r27, 0x0108 1dc: 01 96 adiw r24, 0x01 ; 1 1de: a1 1d adc r26, r1 1e0: b1 1d adc r27, r1 1e2: 80 93 05 01 sts 0x0105, r24 1e6: 90 93 06 01 sts 0x0106, r25 1ea: a0 93 07 01 sts 0x0107, r26 1ee: b0 93 08 01 sts 0x0108, r27 1f2: bf 91 pop r27 1f4: af 91 pop r26 1f6: 9f 91 pop r25 1f8: 8f 91 pop r24 1fa: 3f 91 pop r19 1fc: 2f 91 pop r18 1fe: 0f 90 pop r0 200: 0f be out 0x3f, r0 ; 63 202: 0f 90 pop r0 204: 1f 90 pop r1 206: 18 95 reti 「unsigned long」の加算や比較処理の実態が見えています。 ※関連 ・ラジオペンチ ArduinoのMStimer2の精度の改善 ・Arduinoでの時間管理:放課後マイコンクラブ ・Arduinoの入力速度を調べた |
2016年2月19日 12時01分
| 記事へ |
コメント(1) |
トラックバック(0) |
| ・電子回路工作 |
トラックバックURL:http://blog.zaq.ne.jp/igarage/trackback/4365/
※ブログ管理者が承認するまで表示されません
| ・電子回路工作 |
トラックバックURL:http://blog.zaq.ne.jp/igarage/trackback/4365/
※ブログ管理者が承認するまで表示されません
この記事がきっかけで、下記の記事を書かせていただいたのでご報告。
http://radiopench.blog96.fc2.com/blog-entry-643.html